
Hoy estrené el servo de mi kit básico de Arduino Uno.
Para utilizarlo, seguí instrucciones de varias páginas, pero el ejemplo que más me gustó fue el de www.electroensaimada.com
En él se utiliza la interacción con el puerto serial para enviarle una letra ‘a’ o una letra ‘z’ al robot, y en cada letra se aumenta o disminuye el ángulo del servo.

Aquí, el código para copiar y pegar:
#include
Servo mimotor;
int angulo=90;
void setup()
{
mimotor.attach(9);
Serial.begin(9600);
}
void loop() {
unsigned char comando=0;
if(Serial.available()){
comando=Serial.read();
if(comando=='a')angulo+=10;
else if(comando=='z')angulo-=10;
angulo=constrain(angulo,0,180);
}
mimotor.write(angulo);
Serial.print("Angulo: ");Serial.println(angulo);
delay(100);
}
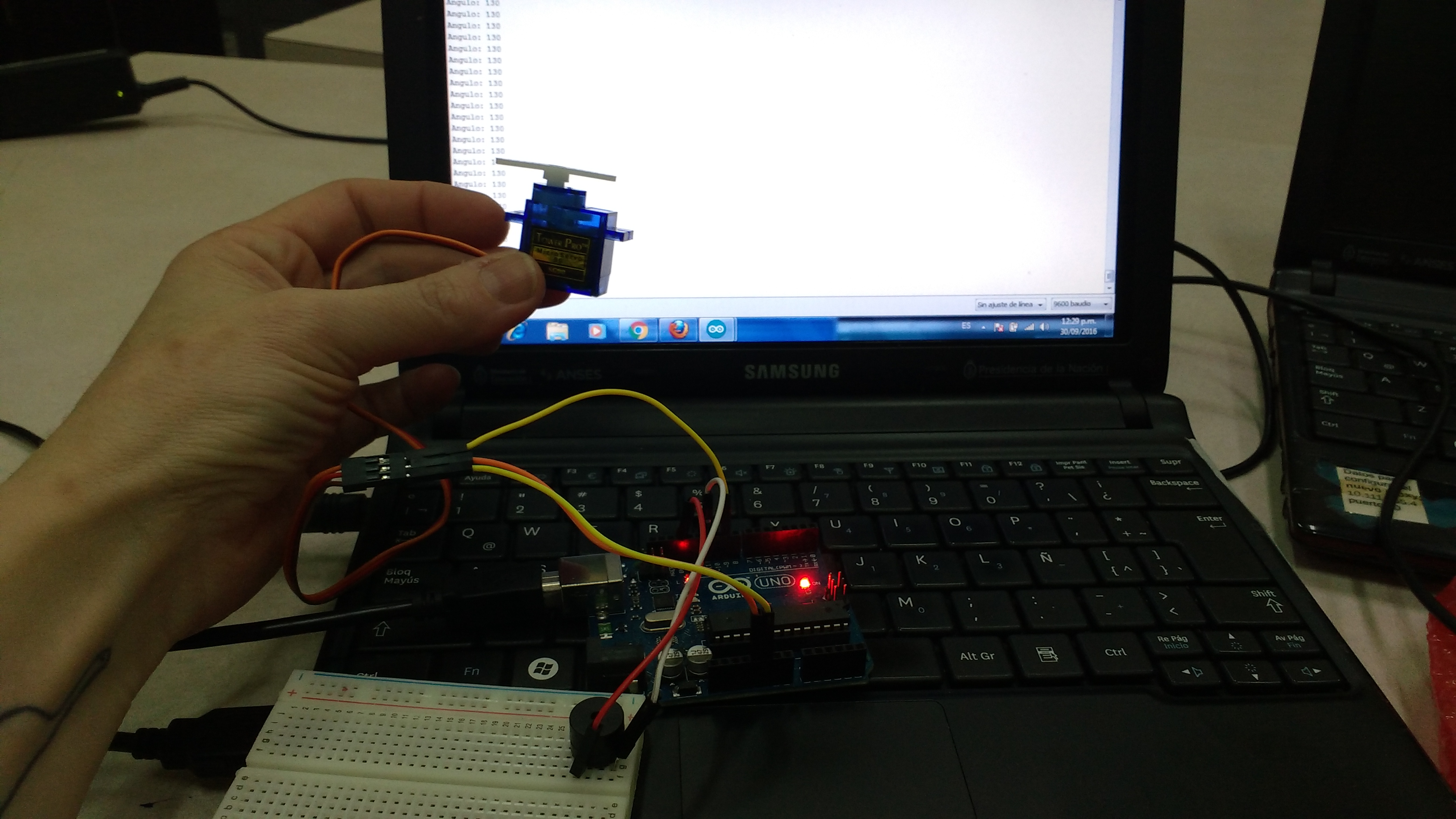
Ver el video del programa funcionando:

Muy bueno,muchas gracias evidentemente empiezo ahora y me cuesta un rato,pero me encuentro que cuando cambio el sentido de funcionamiento,va un paso atrasado es decir si incremento=incremento
decremento= incremento,decremento=decremento,incremento =decremento,decremento =decremento.
No se si me explico suficientemente,no se como resolver este problema.
Gracias de antemano
Hola, es complicado comprender cuál puede ser el error. Como este post tiene dos años, tampoco recuerdo si a mí me funcionó perfectamente de entrada o si tuve que modificar algo.