Continuando en mi camino de hacer distintas partes de un robot humanoide, esta vez le tocó a los ojos.
Siempre me preguntaba cómo hacer para crear ojos que giren hacia arriba/abajo y hacia los costados.
Así nació esta primera versión de HueBot o GüeBot, el robot de ojos de huevos.
Pensando en cómo darle estética al robotito, recordé mis tuppers comprados para esto mismo (para hacer robotitos). Así que lo armé de tal manera que el giro vertical fue reemplazado por una especie de apertura de párpados.
La estructura de conexiones es igual a la de la mano robótica, pero esta vez, al utilizar tres servomotores, no fue necesario agregar las pilas.
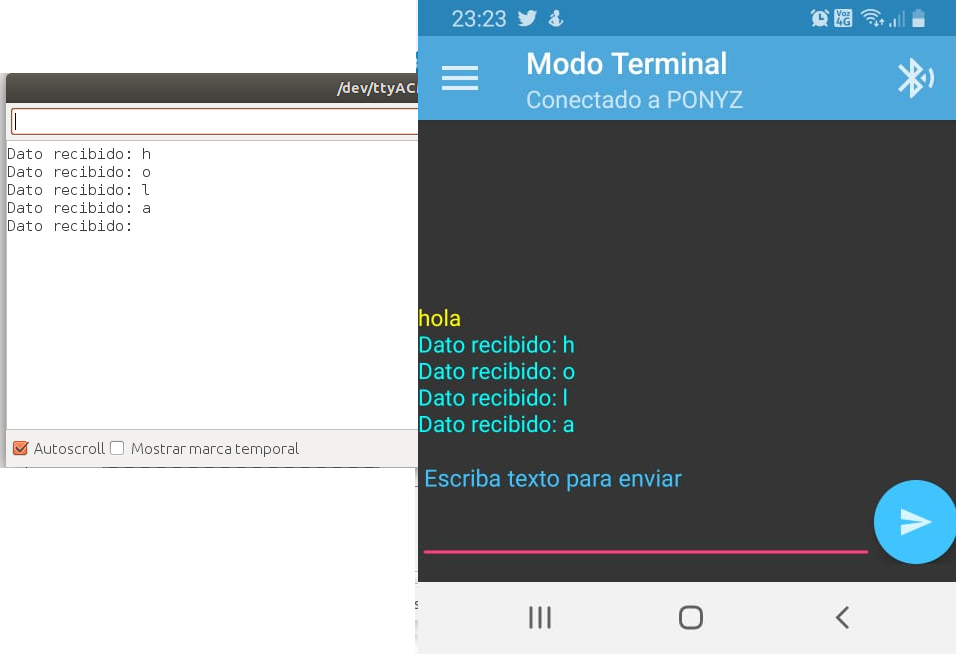
El próximo desafío es el de agregar sensores o manejarlo a través del BlueTooth.
El código hasta ahora:
#include <Servo.h>
Servo myservo1;
Servo myservo2;
Servo myservo3;
void setup() {
myservo1.attach(9);
myservo2.attach(10);
myservo3.attach(6);
}
void loop() {
//arriba
myservo1.write(15);
delay(2000);
delay(1000);
//abajo
myservo1.write(40);
delay(2000);
//izquierda
myservo2.write(40);
myservo3.write(40);
delay(500);
//derecha
myservo2.write(80);
myservo3.write(80);
delay(1000);
//izquierda
myservo2.write(50);
myservo3.write(50);
delay(2000);
}