Si hay un regalo maravilloso para que hagamos en las fiestas, es uno que permita el crecimiento de la otra persona, y no un consumo de objetos caros donde no hay posibilidad de crear.
Una de las mejores cosas que podemos regalar, entonces, es un kit de robótica: una hermosa cajita llena de elementos para explorar, uno a uno, creando cientos de proyectos.
¿Cómo comprar un kit de robótica?
La primer pregunta que yo haría es “cuánto dinero podés gastar”, o “qué es lo que más te interesa hacer con el kit”.
Como hay tantas posibilidades, voy a describir algunos componentes diferentes, más o menos por orden de precio y/o dificultad. Por supuesto, me concentro en kits Arduino, que son de hardware libre y software libre.
Un kit super básico, consistiría en:
Una placa Arduino Uno
Una protoboard
Leds (una bolsita)
Resistencias (una bolsita o dos de distintas capacidades)
Pulsadores (botones de encendido)
Cables (macho-macho y hembra-hembra, los que son flexibles, porque hay unos rígidos que son incómodos de usar)
Un servo motor de 9v
Un buzzer
Un sensor de distancia
¿Qué se puede hacer con este kit? Un semáforo, algunos proyectos con luces y sonido, una barrera de tren que se abra al detectar algo con el sensor de distancia, programar un jueguito simple, un theremin rústico, etc.
Un kit de precio medio, podría consistir en todo lo anterior más algunas de estas cosas, dependiendo de lo que uno tenga ganas de hacer:
Potenciómetro (para aumentar o disminuir la cantidad de luz, de sonido, etc.)
Módulo Bluetooth (para manejar cosas desde el celular)
Módulo Ethernet para conectar a Internet lo que armemos.
Si tenemos realmente mucho dinero, podemos comprar todo lo anterior, y agregar un set de sensores de los que venden en la web, los hay de variadas combinaciones pero no puedo recomendar ninguno porque no tuve la suerte de poder comprarme uno…
Una función es un fragmento de código que realiza una tarea específica, a la que llamamos cada vez que necesitamos que se realice esta tarea.
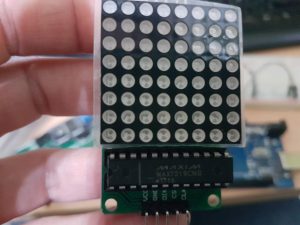
En mi ejemplo, tengo una matriz de leds MAX7219CNG que utilizo como ojos y boca de mi robota humanoide. Entonces programé cuatro funciones:
Mirar para adelante: ojosdefrente()
Pestañear: pestaneo()
Mirar para la izquierda: mirar_izquierda();
Mirar para la derecha: mirar_derecha();
En este primer ejemplo sólo utilizaremos funciones que no devuelven ningún valor, por eso comienzan con void, igual que las ya conocidas void setup() y void loop().
Si una función va a devolver un valor, en lugar de void debe comenzar con el tipo de dato que tendrá lo que devuelva, por ejemplo int. En ese caso, la última línea de la función será return y el valor que debe devolver.
Voy a tomar como ejemplo la función “mirar_izquierda”. Comienza con void porque no devuelve ningún valor, pero entre paréntesis declara la variable tiempo. Esa variable tomará el valor que nosotros le enviemos al llamar a la función:
void mirar_izquierda(int tiempo)
Luego, entre llaves, se escriben todas las acciones de esa función. En este caso todas las líneas de código dibujan la cara mirando a la izquierda:
En la última línea se utiliza la variable que se pasó como parámetro, con un delay:
delay(tiempo); }
Entonces, cada vez que yo necesite que la carita mire hacia la izquierda, puedo escribir simplemente el nombre de la función, y entre paréntesis indicarle el tiempo en milisegundos:
El código lo adapté del tutorial de Prometec, donde se incluye el código para varias matrices porque estas matrices pueden conectarse una con otra. En este caso, al tener una sola matriz sería:
#include "LedControlMS.h"
LedControl lc=LedControl(12,11,10, 1); // Creamos una instancia de LedControl, el último parámetro es la cantidad de matrices
void setup()
{
lc.shutdown(0,false); // Activar matriz número 0
lc.setIntensity(0,0); // Poner el brillo bajo a la matriz 0
lc.clearDisplay(0); // Borrar la matriz 0
}
void loop()
{
lc.writeString(0,"Feliz Ada Lovelace Day");
delay(1000);
}
Y de paso aproveché para felicitar a las mujeres que aportan a la ciencia y la tecnología, en el día de Ada Lovelace:
Hoy utilicé un sensor de nivel de agua con mi nuevo arduino Mega, pero es igual para arduino Uno. La forma de conectarlo es muy sencilla, simplemente tiene tres pines:
Indicador en el sensor
Conexión en la placa Arduino
+
se conecta al positivo (5v)
–
va conectado al negativo (GND)
S
a un pin analógico. En mi ejemplo lo conecté a A0
Gracias a este tutorial de Prometec aprendí que alcanza con este sencillo código para ver la medición:
Utilizando el menú abrimos el monitor serial (en el menú Herramientas), y podemos ver cómo se muestra el nivel de agua:
No conforme con ver en el monitor serial el resultado, conecté también un display LCM 1602. La explicación de como conectarlo es sencilla:
GND – va a GND
VCC – a 5v
SDA y SCL, en el caso del arduino Mega, va a los pines que tienen ese nombre: SDA y SCL. En el caso del arduino Uno, van a A4 / A5 (aquí, más información)
Una vez realizadas todas las conexiones, este fue el código que utilicé:
#include <Wire.h>
#include <LCD.h>
#include <LiquidCrystal_I2C.h>
LiquidCrystal_I2C lcd(0x27, 2, 1, 0, 4, 5, 6, 7, 3, POSITIVE); // Addr, En, Rw, Rs, d4, d5, d6, d7, backlighpin, polarity
int agua = 0;
void setup()
{
Serial.begin(9600); // para utilizar el sensor de agua
lcd.begin(16,2); // inicializa el display
lcd.backlight(); // enciende la luz del display
lcd.setCursor(0, 0); // acomoda el cursor
lcd.print("Nivel de agua: "); // escribe el texto
}
void loop()
{
lcd.clear(); // borra el contenido del display
lcd.setCursor(0, 0); // acomoda el cursor
lcd.print("Nivel de agua: "); // escribe el texto
lcd.setCursor(12, 1); // acomoda el cursor
agua = analogRead(A0); // guarda en variable valor del sensor de agua
lcd.print(agua); //Escribe en el display el valor del sensor
Serial.println(agua); //Escribe en el monitor serial el valor de agua
delay(50); // espera un poquito antes de continuar
}
Un dato: Al conectar el display, el valor devuelto por el sensor de agua se altera, no vuelve a 0 sino que queda en 8 aproximadamente.
Hoy comencé con el armado de una robota humanoide.
Como primer paso me concentré en el armado de los brazos.
Utilicé dos motores para uno de los dos brazos, basándome en la idea de web-robotica.com
¿Cómo lo hice?
Pegando con cinta, atando con alambre, uní los motores al cuerpo (una botella vacía de lavandina), y conecté los motores de la siguiente manera:
Cable rojo: positivo
Cable marrón: negativo
Cable anaranado: pin pwm
Tomé el ejemplo “sweep” del Arduino IDE y lo modifiqué para tres motores, quedando así:
void setup() {
myservo.attach(9); // attaches the servo on pin 9 to the servo object
myservo2.attach(10); // attaches the servo on pin 9 to the servo object
myservo3.attach(11); // attaches the servo on pin 9 to the servo object
}
void loop() {
for (pos = 0; pos <= 90; pos += 1) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(25); // waits 15ms for the servo to reach the position
}
for (pos = 0; pos <= 90; pos += 1) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
myservo2.write(pos); // tell servo to go to position in variable 'pos'
delay(25); // waits 15ms for the servo to reach the position
}
for (pos = 90; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(25); // waits 15ms for the servo to reach the position
}
for (pos = 90 ; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees
myservo2.write(pos); // tell servo to go to position in variable 'pos'
delay(25); // waits 15ms for the servo to reach the position
}
for (pos = 90 ; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees
myservo3.write(pos); // tell servo to go to position in variable 'pos'
delay(25); // waits 15ms for the servo to reach the position
}
for (pos = 0; pos <= 90; pos += 1) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
myservo3.write(pos); // tell servo to go to position in variable 'pos'
delay(25); // waits 15ms for the servo to reach the position
}
}
Los “ojos” son parte de una lectora de CD que desarmé para sacarle el motor.
Me escribió @analiasoledadm porque no podía avanzar en sus investigaciones, al no encontrar tutoriales de las piezas exactas que venían en su kit Arduino.
¿Y cómo se hace para encontrarlos?
Cada una de las piezas del kit tiene un nombre y un modelo. Al comprar el kit seguramente estaría indicado en una lista, pero suele ocurrir que recibamos la cajita sin más y tengamos que ponernos a trabajar.
Entonces, la solución está en la misma pieza: buscar en google los códigos impresos de cada una de ellas.
Por ejemplo, voy a tomar mi display LCD, pero no uno de los comunes sino uno que vino con algo más:
Instalo la librería descomprimiéndola en la carpeta correspondiente (en Windows es Documentos / Arduino / Library, en Linux está en la carpeta del usuario, Arduino / Libraries).
Después, en el IDE de Arduino, voy al menú y utilizo la opción para incluir una librería, confirmando que la instalé correctamente (al ver la librería nueva en la lista)
Copio y pego el código propuesto en la página, modificando un poquito el texto. ¡Funciona!
Nota: después encontré de qué manera encender la retroiluminación, me faltaba un jumper así que le puse un cable que conecta los dos pines:
Unir estos dos pinesRetroalimentación encendida
Ahora no sólo le cambio el texto sino que hago alguna prueba más para ver mi texto en movimiento, utilizando un bucle:
Como usuaria de Linux hay cosas que hago todos los días, y por lo tanto, retengo en mi memoria.
Pero hay otras, como formatear un pendrive, que sólo hago en un caso: cuando usé mi pendrive en una escuela cuyas computadoras con Windows están llenas de virus.
Como lo hago muy esporádicamente, no recuerdo cómo se hace.
Estaba necesitando mostrar una grilla donde se linkeara a los posts de una categoría en particular, en WordPress.
Buscando en la web, encontré el plugin WP Ultimate Post Grid, que permite:
Crear una gilla
Elegir qué tipo de contenido tendrá la grilla (en mi caso “Categorías”)
Insertar la grilla en una página
Personalizar el CSS de la grilla
Para personalizar el CSS, tuve que explorar los nombres y estilos de cada recuadro, logrando identificar un elemento personalizable por cada categoría:








 Nota: después encontré de qué manera encender la retroiluminación, me faltaba un jumper así que le puse un cable que conecta los dos pines:
Nota: después encontré de qué manera encender la retroiluminación, me faltaba un jumper así que le puse un cable que conecta los dos pines:

