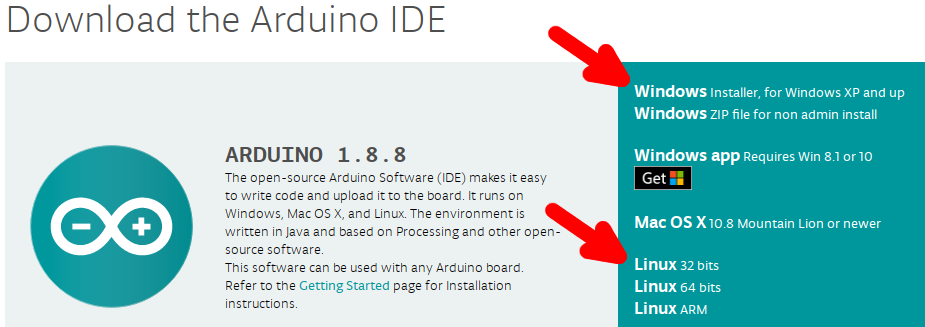
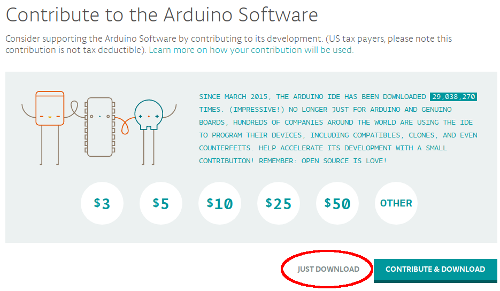
En la entrada anterior, expliqué cómo descargar el IDE de Arduino (“Integrated Development Environment”, es decir “Entorno de Desarrollo Integrado”). Después conectamos la placa Arduino y descargamos un ejemplo que hace titilar una luz led que está integrada a la placa.
Ahora vamos a empezar a entender un poco del programa que descargamos. Vemos tres secciones:
- La primera parte, que se ve toda de color gris comienza con /* y termina con */. Todo eso se llama “comentarios”, y es un texto en inglés que explica de qué se trata el programa. Lo podemos eliminar para aclarar el panorama.
Todo lo que figure entre /* y */ va a ser ignorado por Arduino, así que podemos escribir algo allí que no va a influir en nada:
/* Eliminamos los comentarios en inglés pero podemos escribir algo en castellano */
Otra forma de escribir comentarios es comenzar con doble barra:
// Esto es un comentario, sirve para poner anotaciones para uno mismo
- Después viene un segundo bloque que comienza con “void setup()”. Todo lo que figura entre llaves { } dentro de “void setup()”, son órdenes que se van a ejecutar una sola vez al comienzo del programa. En este caso hay dos renglones. Un comentario en inglés, que lo eliminamos, y una orden que es “PinMode”. En un rato la analizamos.
void setup() {
pinMode(LED_BUILTIN, OUTPUT);
}
- Por último el bloque “void loop()”. Todo lo que viene entre llaves después de “void loop()” se ejecutará en bucle, una y otra vez, hasta que desenchufemos el Arduino.
void loop() {
digitalWrite(LED_BUILTIN, HIGH);
delay(1000);
digitalWrite(LED_BUILTIN, LOW);
delay(100);
}
| digitalWrite(LED_BUILTIN, HIGH); |
Encender el led integrado a la placa (“led built-in”). La orden significa “escribir en un pin digital el valor 1”. Un pin digital puede valer 1 o 0. O lo que es lo mismo, “high” o “low” (“encendido” o “apagado”). |
| delay(1000); |
Esperar un segundo (mil milisegundos) |
| digitalWrite(LED_BUILTIN, LOW); |
Apagar el led “built-in” |
| delay(1000); |
Esperar un segundo (mil milisegundos) |
Entonces, vamos a hacer unos cambios al programa para entenderlo más.
Donde dice:
delay(1000)
Vamos a poner otros números:
delay(500)
delay(2000)
Y cada vez que hacemos un cambio, probamos usar el botón “subir” para pasar ese programa a la placa. Recordemos que hay dos “delay”. El primero es el tiempo que espera el led estando encendido, y el segundo el tiempo que espera apagado.
Conectando un led
Ahora vamos a conectar un led, dejando de utilizar el “built-in”.
Antes de hacer cualquier conexión, desenchufamos la placa (siempre).
Cada led (“diodo emisor de luz”) tiene una pata más larga y una más corta. La pata más larga se llama “ánodo” y es la positiva. La pata corta “cátodo” y es la pata negativa.
Como primer experimento, vamos a conectar el LED en el pin 13. Es decir, la pata larga del LED en el pin 13, y la pata corta en “tierra” (GND, “ground”).
 Aclaración importantísima: el pin 13 es el único que tiene resistencia propia. En todos los demás pines no podemos conectar un led directamente porque se quema.
Aclaración importantísima: el pin 13 es el único que tiene resistencia propia. En todos los demás pines no podemos conectar un led directamente porque se quema.
Si volvemos a conectar la placa (que ya tiene cargado el programa anterior) vamos a ver que el led que conectamos en el pin 13 titila igual que el led integrado a la placa (built-in). Esto es porque el led built-in y el pin 13 están interconectados.
Utilización de un led en otro pin
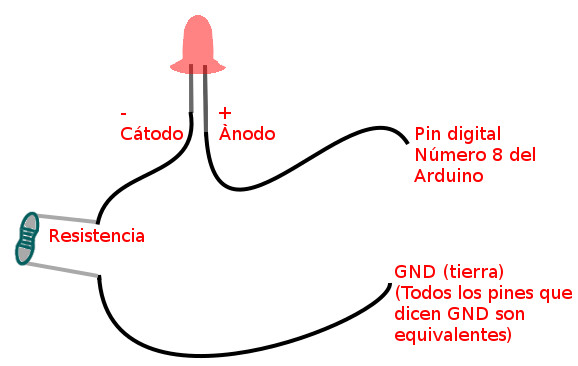
Para conectar un led en cualquier otro pin digital (los que están numerados y no comienzan con A), por ejemplo el pin número 8, deberíamos agregar una resistencia. ¿Por qué? Porque la resistencia impide que el LED reciba más electricidad de la que puede soportar. Se usa para que el componente no se queme.
Por lo tanto, deberíamos hacer algo como esto (los negros son cables):
Pero claro, sería muy incómodo realizar estas soldaduras y que después no funcione el circuito. Entonces, en lugar de soldar, utilizamos una placa de pruebas.
Entendiendo la protoboard
La protoboard es la placa de pruebas que viene generalmente acompañando a la placa Arduino. Se trata de una superficie con agujeritos donde podemos ver unos números, un signo + y un signo –
¿Para qué sirve? Para poder hacer circuitos de prueba, sin necesidad de soldar las conecciones.
Para entender cómo se usa, hay que saber que los agujeritos están conectados entre sí. Pero no todos con todos:
- Las dos filas que tienen el signo + y el signo – tienen todos sus agujeritos conectados entre sí.
- Las columnitas que están numeradas, tienen cinco agujeritos interconectados.

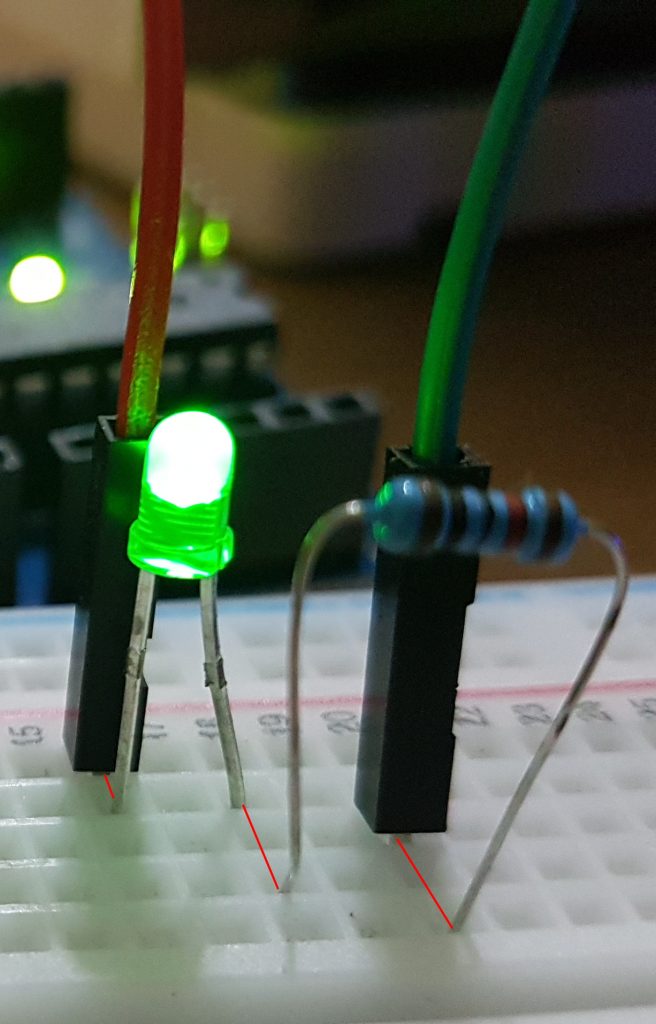
Entonces, para repetir el esquema anterior tenemos que conectar:
- La pata larga del LED en la misma columnita que el cable que se conecta al pin número 8
- La pata corta del LED en la misma columnita que una pata de la resistencia
- La otra pata de la resistencia en la misma columnita que el cable que lleva a GND (cualquier GND, ya que todos son iguales).

Es decir, no importa en qué columnita conectamos cada cosa, lo importante es que estén en la misma columna las cosas que deben ir interconectadas. Aquí lo muestro con líneas rojas:
El programa
Hasta ahora teníamos un programa que encendía y apagaba el led conectado en el pin 13, y el led “built-in” a la vez. Ahora lo vamos a modificar para que encienda y apague el led conectado en el pin digital número 8. Para eso, cada vez que dice “led_builtin”, lo cambiamos por el número 8:
void setup() {
pinMode(8, OUTPUT);
}
void loop() {
digitalWrite(8, HIGH);
delay(1000);
digitalWrite(8, LOW);
delay(100);
}
Lo descargamos (con el botón “subir”) y… ¡Listo! El led conectado en el pin número 8 está titilando.
PinMode
Algo que quedó “para después”, fue el comando “pinMode” que está en void setup():
void setup() {
pinMode(8, OUTPUT);
}
Esa línea de código lo que le indica al Arduino es que determinado pin va a estar en modo salida (“output”). En este caso sería el pin número 8, va a salir información (encender o apagar el led).
Si tuviésemos un botón conectado en ese pin, le diríamos que será un pin de entrada (“input”).