
Comparto aquí la presentación que creé para una charla y luego reutilicé varias veces para mis clases. Está realizada en cryptpad.fr, que es una plataforma que nos permite crear textos colaborativos, presentaciones colaborativas, tableros Kanban, etc.
Para quien tenga ganas de probar la herramienta de presentaciones de CryptDrive, comparto aquí el código de la presentación, en formato Markdown:
# **Cultura libre**
### Iris Fernández
<ul class="lista"><li class="lista">Conceptos básicos</li>
<li class="lista">Licencias Creative Commons</li>
<li class="lista">Software Libre</li>
</ul>
<div class="recuadro1"><span style="color: #fff;">Agosto 2021</span></div>
---
# **Escasez artificial**
### Una definición de economía
Muchas definiciones de economía enfatizan el hecho de trabajar con bienes escasos
<div class="recuadro1"><span style="color: #fff;">Economía es “el estudio de la manera en que las sociedades utilizan los recursos escasos para producir mercancías valiosas y distribuirlas entre los diferentes individuos.” (Samuelson,P. y Nordhaus, 2004:4)
</span></div>
---
### Tipos de bienes
**Bienes no rivales**: el consumo por parte de una persona no impide que otra persona también lo consuma. Ejemplo: un programa de televisión, un parque, el aire.
**Bienes no excluibles**: se trata de bienes de los cuales no se puede excluir a las personas, por ejemplo, un espectáculo de fuegos artificiales, la vereda o la calle.
<div class="recuadro1"><span style="color: #fff;">Bienes excluibles pero no rivales: la música, los cuentos, las obras literarias, el software, las fotografías digitales</span></div>
---
# **Escasez artificial**
>Vender por unidad los libros tenía su lógica en la época en que sólo se podía acceder a ellos a través del libro impreso.
>Vender por unidad los discos, cuando la gente no tenía cómo hacer una copia, tenía su lógica.
Pero al avanzar la tecnología se genera una **escasez artificial** para poder seguir vendiendo copias.
---
# **Derechos de autor**
##### Legislación argentina: ¿Es necesario registrar una obra para protegerla?
>"No. Las obras están protegidas desde el momento de su creación sin ningún otro requisito. Pero si registrás tus obras es más fácil probar que sos el autor y que sos el titular de los derechos sobre esas obras.
>Registrar las obras también te permite probar cuándo hiciste tu obra. Eso es importante cuando otra persona dice que una obra le pertenece.""
Fuente: https://www.argentina.gob.ar/justicia/derechofacil/leysimple/propiedad-intelectual#titulo-1
---
### ¿Qué obras están cubiertas por el derecho de propiedad intelectual?
Entre otras:
* Libros y otros escritos. Obras dramáticas.
* Fotos, dibujos, pinturas, esculturas y obras de arquitectura.
* Planos, mapas y maquetas.
* Obras cinematográficas y audiovisuales.
* Emisiones de radiodifusión.
* Composiciones musicales, grabaciones y fonogramas.
* Coreografías.
* Programas de computación.
* Bases de datos.
---
## ¿Cuánto dura el derecho de propiedad intelectual?
* Para el autor: toda su vida.
* Para los herederos: 70 años desde la muerte del autor (desde el 1 de enero del año siguiente a la muerte).
* Para intérpretes y productores de fonogramas (registros sonoros): 70 años desde la primera publicación
* Para las obras fotográficas: 20 años desde la primera publicación.
* Para las obras cinematográficas: 50 años desde la muerte del último de los colaboradores.
Fuente: https://www.argentina.gob.ar/justicia/derechofacil/leysimple/propiedad-intelectual#titulo-1
---
## ¿Qué pasa cuando terminan los plazos de protección de la propiedad intelectual?
* La obra puede ser utilizada por cualquiera de manera libre porque pasa a ser del dominio público.
* Una vez que una obra pertenece al dominio público, no puede ser registrada nuevamente.
---
<media-tag src="https://files.cryptpad.fr/blob/8d/8d523b843b6c081fb91d24fb8b4304c4ab751954c8bc5308" data-crypto-key="cryptpad:rqIq7j46NLZdtCqL+BzxAsTSpVsBn4y/Y9ljmBAZgCw="></media-tag>
https://www.tiempoar.com.ar/espectaculos/otro-round-de-la-disputa-entre-litto-nebbia-y-sony/
---
# Uso de obra ajena
>¿Pueden incluirse trozos de obras ajenas en una obra propia?
Sí. Se pueden incluir 1000 palabras como máximo en obras literarias o científicas y 8 compases en obras musicales.
>¿Qué pasa si se utilizan obras sin autorización?
El uso de obras sin permiso del autor está penado por la ley con pena de prisión. También se puede secuestrar el material publicado sin permiso del autor.
https://www.argentina.gob.ar/justicia/derechofacil/leysimple/propiedad-intelectual#titulo-1
---
### Caso Horacio Potel
<media-tag src="https://files.cryptpad.fr/blob/cb/cb15fc27db1e2f0b1d3f0f429469510f9270f5495a4cd391" data-crypto-key="cryptpad:lKfFu603zusHl4H5GtT1x62zYUJVCLNUAKTPpChL5IQ="></media-tag>
https://www.pagina12.com.ar/diario/suplementos/espectaculos/17-13662-2009-04-26.html
---
### Caso Horacio Potel
>"Para Potel, lo que él hacía era lo que los profesores han hecho durante siglos: ayudar a los estudiantes a acceder al conocimiento".
>“Muchos de los textos allí incluidos ya están agotados”, argumenta Potel. Los libros que están agotados no pueden ser adquiridos por los lectores y aún así están protegidos por leyes de propiedad intelectual."
Filosofo argentino acusado de infraccion a los derechos a la propiedad intelectual
---
## Si queremos que una obra propia pueda ser utilizada, debemos elegir una licencia no restrictiva
>Poner tus obras bajo una licencia Creative Commons no significa que no tengas derechos como autor/a. Este tipo de licencias ofrecen algunos derechos a otras personas bajo ciertas condiciones.
Las cuatro condiciones pueden ser:
Atribución - Obra derivada - No comercial - Compartir igual
---
<media-tag src="https://files.cryptpad.fr/blob/79/799f1f5d456a4969b8ab04727156e14cd2eb3047350652db" data-crypto-key="cryptpad:dE7tRkxMhLxr6YJikbfn7HdjthTJNhpi7NHXJLqm5uo="></media-tag>
---
### ¿De qué vive un escritor?
>Vivo de la literatura pero no de la escritura, o si se prefiere me gano la vida leyendo. En los últimos quince años he trabajado alternativamente como asesor editorial o enseñando literatura. (Ricardo Piglia, Crítica y ficción, Anagrama, 1982)
Fuente: https://elblogdeguillermoschavelzon.wordpress.com/2014/09/30/de-que-vive-un-escritor3/
---
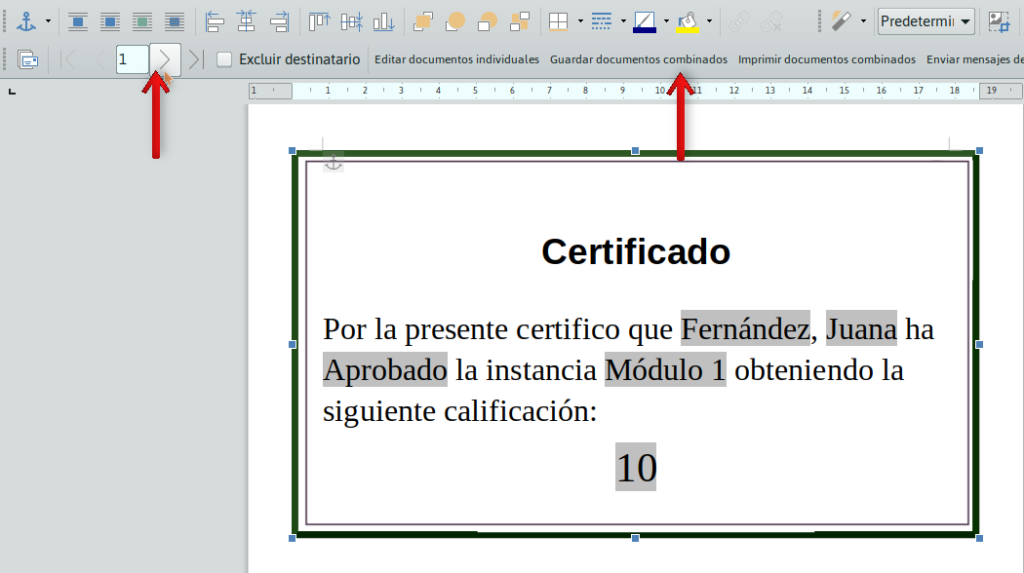
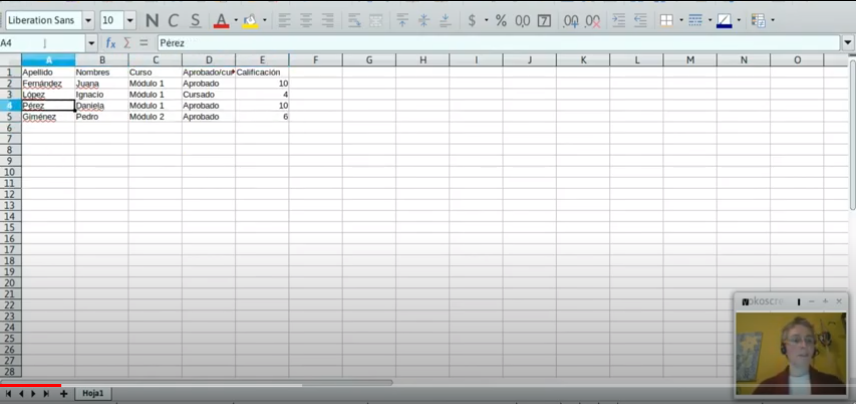
### ¿Qué ocurre cuando utilizamos licencias poco restrictivas en nuestras obras?
Un ejemplo en primera persona:
https://commons.wikimedia.org/wiki/File:Dentista1.jpg
<media-tag src="https://files.cryptpad.fr/blob/ca/cad96f0a8b28086633cb8ce504953d2a26d74d35b8ec2832" data-crypto-key="cryptpad:pefCsLjM8/bZjtBMHq7JKZVJFEgcL3Be5KbVw17qQqg="></media-tag>
---
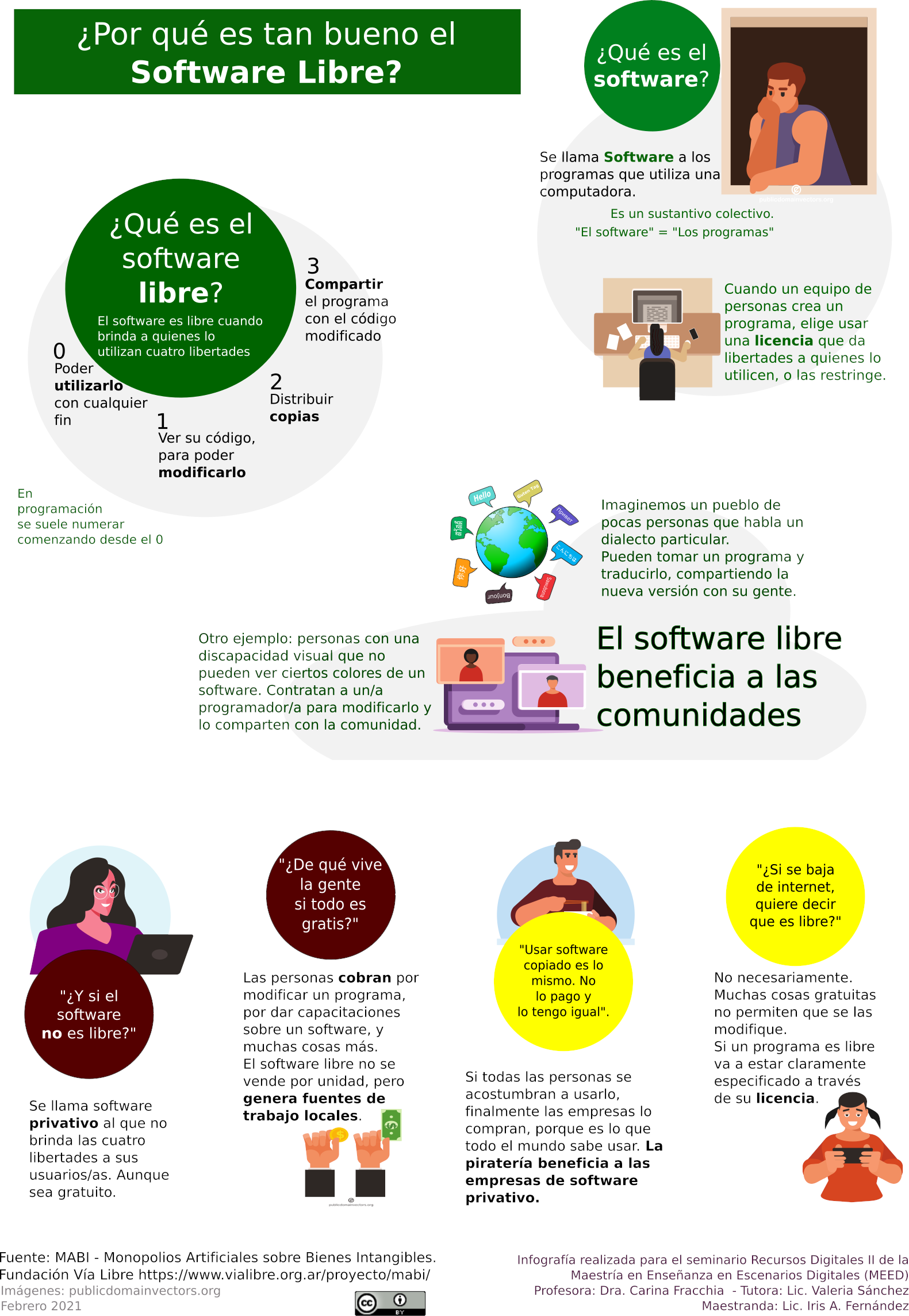
## El software libre
# ¿Qué es el software?
* Es la parte intangible de un sistema informático, es decir, los programas.
* Las personas que crean el software son programadores/as, diseñadores/as de interacción, arquitectos/as de la información, expertos/as en usabilidad
* Estas personas pueden decidir que su software pueda ser copiado libremente, modificado, y compartido con las modificaciones
---
## Origen del concepto
* Durante los primeros años de la industria informática, los/las programadores/as compartían segmentos de código libremente.
>Por aquel entonces (década del 70) Richard Stallman estaba elaborando un intérprete de Lisp que interesó a la compañía Symbolics. Este accedió a proporcionarles una versión del intérprete bajo dominio público, sin restricciones iniciales. Más tarde, la empresa amplió y mejoró el software original, pero cuando Stallman quiso acceder a dichas modificaciones, la compañía se las negó.
En 1983 Stallman anunció el comienzo del proyecto GNU
Fuente: https://es.wikipedia.org/wiki/Copyleft
---
<media-tag src="https://files.cryptpad.fr/blob/bf/bfaa81472168d8d08af23585fdd8a41c5fecd73529e53cef" data-crypto-key="cryptpad:6RRQB8TkeD8MJi8QmOFiHAlqc5uy//+M/LEO/qrcls0="></media-tag>
---
## El software libre brinda cuatro libertades y una obligación
>El software que se modificó y se comparte con modificaciones, debe ser compartido con la misma licencia (GPL - General Public Licence)
Por eso se dice que la licencia GPL es viral
---
## Cómo identificarlo
Cuando queremos saber si determinado programa es libre, tenemos que buscar la leyenda que indica cuál es su licencia.
<media-tag src="https://files.cryptpad.fr/blob/78/7885caa1919596ea37ffb34376b7664eeef1faf4100547ff" data-crypto-key="cryptpad:NtYQF6H++HsJAubBO7AbZaU6rhkC6rGJVB80lmgel7M="></media-tag>
---
### El software libre beneficia a las comunidades
>Usar software libre implica dar trabajo a equipos de programadores locales (que lo traducen y adaptan)
>También permite traducir a idiomas con pocos hablantes, algo que no es negocio para las empresas que venden software
---
### El software libre beneficia a las comunidades
>Es posible adaptarlo para el uso de personas con discapacidad, tanto si son muchas personas como si es una sola con una necesidad específica.
>Si un/a programador/a deja de actualizar un programa, se puede continuar actualizando con otro equipo de trabajo.
---
## Por qué usar software libre en educación
>Para seguir enseñando a compartir, como lo hacemos con las demás cosas
>Para enseñar el valor de lo legal (no usar software pirateado)
>Para pertenecer a comunidades, que consultan y colaboran en foros con otros/as usuarios/as cuando tienen dudas
---
# Gracias
<media-tag src="https://files.cryptpad.fr/blob/ce/ceec2bfaa7d9eeeaaf556b62e6d726c1a7398f094f911b70" data-crypto-key="cryptpad:2yMR8oJYvxxsjITMIMVjL+JmfO15VSEKgwqyC1Hz/mE="></media-tag>
Licencia Creative Commons Atribución
<div class="recuadro1"><span style="color: #fff;">Iris Fernández - Julio 2021</span></div>













{kind=link}
{kind=link}
{kind=link}